

{kind=link}
ในครั้งที่แล้วเราจำลองการทำ BIM อย่างง่าย โดยการสร้างกำแพงเพียงด้านเดียวไปแล้ววันนี้ ทีมงาน Dfine ขออัพสกิลกันขึ้นมาอีกเล็กน้อย โดยเราจะนำเสนอสิ่งที่เป็นประโยชน์จากการสแกนพื้นที่ด้วยระบบ Lidar Scan ที่จะให้ผลเป็น Point cloud ออกมาอย่างะเอียดยิป ซึ่งเราจะนำ point cloud นี้มาเป็นฐานหลักของการทำงานในครั้งนี้ ซึ่งจะขอทำความเข้าใจกันอีกครั้งสำหรับไฟล์ BIM ย่อมาจาก Building Information Modelling เป็นกระบวนการสำหรับการสร้างและจัดการข้อมูลโครงการก่อสร้างตลอดทั้งโครงการ ผลลัพธ์หนึ่งที่สำคัญของกระบวนการนี้คือการสร้างแบบจำลองข้อมูลอาคาร ซึ่งจะอธิบายลักษณะทั้งหมดแบบดิจิตอลของการสร้าง การวาดแบบจำลองตามที่รวบรวมข้อมูลและการอัพเดทขั้นตอนสำคัญของโครงการ การสร้างแบบจำลองข้อมูลอาคารแบบดิจิตอลจะช่วยให้ผู้ที่เกี่ยวข้องกับการสร้างอาคารสามารถสื่อสารระหว่างกันเพื่อเพิ่มประสิทธิภาพการทำงานของพวกเขาได้ ส่งผลให้งานมีมูลค่าที่สูงขึ้น และหัวใจหลักในทำงานของ Building Information Modeling คือ กระบวนการในการสร้างแบบจำลองของอาคารที่เกิดจากการเชื่อมโยงข้อมูลต่างๆ ภายในโครงการเข้าด้วยกัน ไม่ว่าจะเป็นในรูปแบบของ 2 มิติ หรือ 3 มิติ เพื่อเป็นฐานข้อมูลที่จะสามารถนำไปใช้ในการประมวลผลต่างๆ ที่เกี่ยวข้องกับการออกแบบและการก่อสร้าง ทั้งในเรื่องของงานระบบน้ำ ระบบไฟ ผังพื้น การตรวจสอบทิศทางของแสงที่ตกกระทบอาคาร รูปด้าน รูปตัด ทัศนียภาพโดยรอบตัวอาคาร รวมถึงยังสามารถถอดปริมาณวัสดุได้อย่างแม่นยำ นอกจากนี้เมื่อมีการเปลี่ยนแปลงข้อมูลไม่ว่าจะเป็นส่วนไหนของการออกแบบ ระบบก็จะปรับเปลี่ยนและบันทึกให้เป็นข้อมูลล่าสุดรวมถึงคำนวณทุกอย่างมาให้โดยอัตโนมัติ (ขอบคุณข้อมูลจาก : www.bimspaces.com)

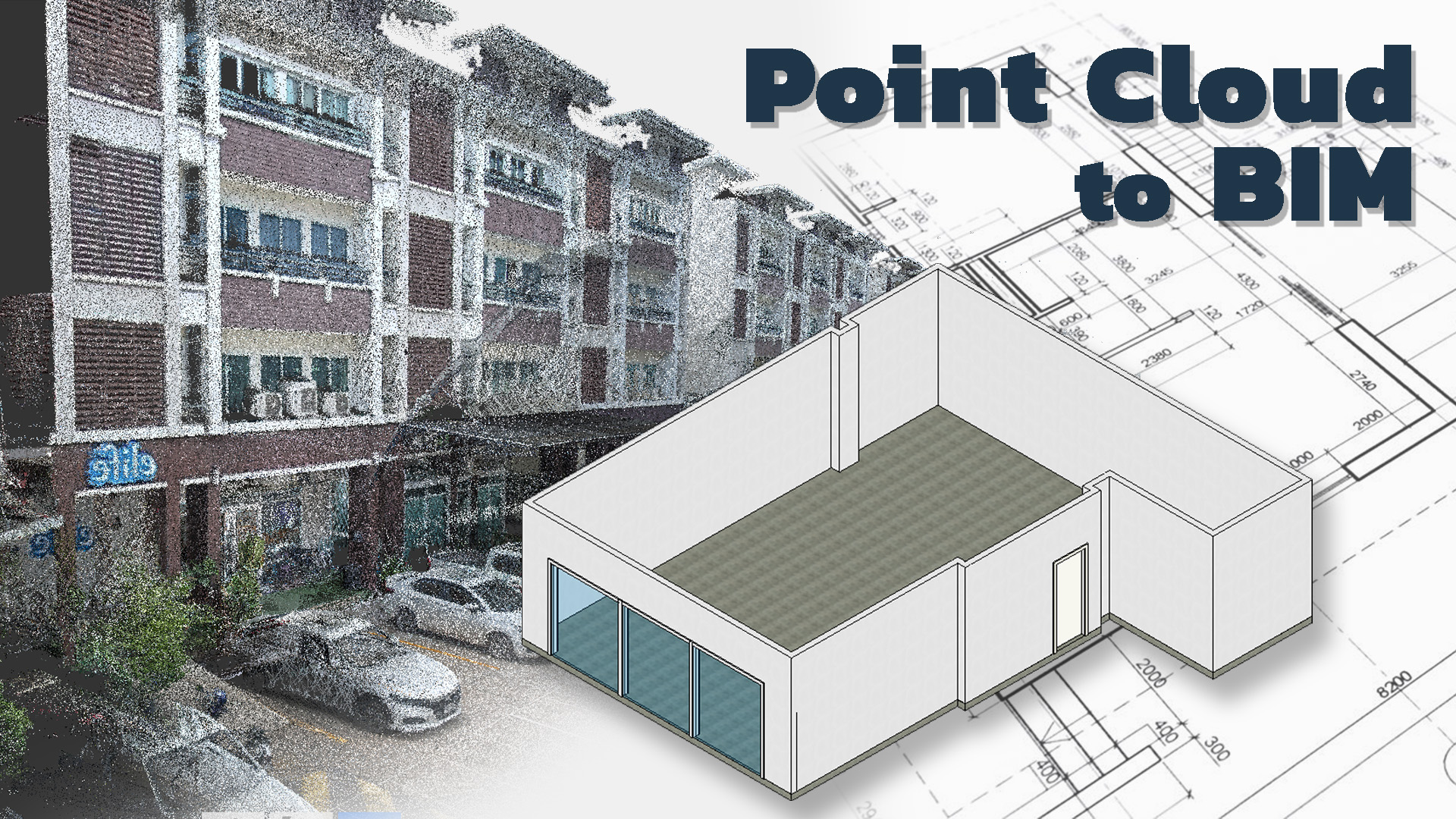
โดยวันนี้เราจะนำไฟล์ point cloud ที่เราได้ทำการสแกนเอาไว้แล้ว ซึ่งเป็นการสแกนพื้นที่ภายในร้าน elife ที่เป็นร้านขายอุปกรณ์รถเข็นไฟฟ้า มาเป็นแบบในการทำวงานในครั้งนี้ ซึ่งต้องบอกไว้ก่อนเลยครับว่า อุปกรณ์ที่เราใช้นั้นมีชื่อว่า slam 100 ซึ่งให้ประสิทธิภาพการสแกนที่ค่อนข้างทำได้ดีในระยะไกล เรียกได้ว่ายืนอยู่กับที่แต่สแกนได้ไกลถึง 100 เมตรเลยทีเดียว (ดูรีวิวการสแกน คลิกที่นี่) ซึ่งการทำงานของเราในครั้งนี้ก็เป็นหนึ่งในการ Reverse Engineer วิธีหนึ่งเช่นกัน โดยจะมีวิธีการทำหรือใช้โปรแกรมอะไรบ้างนั้นติดตามกันได้เลยครับ
ตัวอย่างการใช้งาน Point Cloud จากการสแกนเพื่อสร้างไฟล์ BIM

1. ปรับรูปถนนให้ตรง การปรับถนนให้ตรงนี้เป็นการกำหนดเพื่อให้เรานั้นสามารถทำงานได้ง่ายยิ่งขึ้นเพราะว่าการปลูกสิ่งก่อสร้างนั้นจะต้องใช้ความเที่ยงตรงเป็นปัจจัยสำคัญมาเป็นอันดับหนึ่งเพราะถ้าหากตึกไม่มีความเที่ยงตรงตั้งแต่ก่อสร้างนั้น อาจจะทำให้ตึกถล่มลงมาก็ได้ ซึ่งเราขอเริ่มกันตั้งแต่การออกแบบเลยทีเดียว และวิธีการทำให้ถนนหรือแนวตึกตรงเสมอกันนั้นเราสามารถกดเลือก point cloud จากนั้นกดเลือกเครื่องมือ Rotate จากนั้นให้เรามองหาแนวเส้นทะแยงสักหนึ่งเส้น จากนั้นกดที่จุดนั้นจะเกิดเป็นเส้นประบน point cloud จากนั้นลองขยับเม้าส์สักเล็กน้อย จะเกิดเส้นประที่จะเป็นตัวอย่าง แนวระนาบตรงขึ้นมา และหากเรากดเม้าส์อีกหนึ่งครั้ง point cloud ตรงตามแนวเส้นที่เกิดขึ้น

2. กำหนดเส้นความสูง เช่นเคยสำหรับขั้นตอนนี้ที่เราต้องทำกันเป็นสิ่งวแรก เพราะเป็นการกำหนดสเป็กของงานตามหลักวิศวกรรม และยังเป็นการกำหนดค่าความสูงในการวางเสาเข็ม กำแพง เพดาน ของงานอีกด้วย ซึ่งในโปรแกรมนั้นจะมีให้เป็นอัตโนมัติอยู่แล้ว เราเพียงแค่กำหนดเส้นความสูงให้อยู่ในระนายบเดียวกันกับระดับของ point cloud เพียงเท่านั้นเราก็จะได้รดับความสูงของอาคารที่เราต้องการทำงานแล้ว ซึ่งเราสามารถวัดความสูงของหน้างานได้ผ่านโปรแกรม Revit อีกด้วย

3. สร้างกำแพงโดยรอบ หลังจากที่เรานำเข้า Point Cloud เรียบร้อยแล้วลำดับแรกเราจะทำการสร้างกำแพงกันก่อนเลย เนื่องจากเป็นโครงสร้างหลักของอาคาร ซึ่งเราสามารถใช้ประโยชน์จาก Point Cloud ที่เราสแกนมาได้ทันที โดยโปรแกรมสามารถที่จะ snap ไปที่จุด point cloud ได้ซึ่งเป็นตัวช่วยในการทำงานให้ง่ายขึ้น จากนั้นเราก็สามารถที่จะกำหนดความยาวของกำแพงได้โดยกาลากเม้าส์หรือการใส่ค่าตัวเลขได้เช่นกัน ซึ่งเราสามารถทำกำแพงของอาคารนี้ได้อย่างต่อเนื่องรอบๆ อาคารได้เลย

4. กำหนดความสูงของกำแพง ซึ่งจากที่เราได้ตั้งค่าของเส้นความสูงไว้นั้น การกำหนดความสูงของกำแพงนั้นก็สามารถทำได้โดยไม่ยากมากนัก ซึ่งเราสามารถเลือกกำแพงที่ต้องการกำหนดความสูงจากนั้นไปที่แถบ propertise จากนั้นเลือกตัวเลือกในช่อง Top Constraint โดยเราจะเลือกตัวที่เป็นเส้นความสูงที่เราต้องการ เพียงเท่านี้เราก็จะกำหนดความสูงของกำแพงได้แล้ว

5. สร้างประตูกระจก การสร้างประตูนั้นจริงอยู่ที่ในโปรแกรมนั้นมีเครื่องมือการประตู และกำหนดขนาดประตูโดยอัตโนมัติ แต่สำหรับประตูของร้าน elife นั้นเป็นประตูกระจกที่เป็นแนวยาว เราจึงต้องเริ่มต้นจากการวัดความยาวของประตูซึ่งเราสามารถใช้เครื่องมือวัดจากจุด point cloud ได้เลย จากนั้นสามารถกำหนดความยาวของประตู ต่อด้วยการลากประตูให้ตรงกับจุด point cloud และสุดท้ายเราสามารถกำหนดวัสดุประตูให้เป็นกระจกจากแถบ Edit Type ด้านซ้ายมือ

6. การปูพื้นห้อง หลังจากที่เราได้ผนังของห้องและประตูแล้วนั้น สิ่งที่ต้องทำต่อมาคือการทำพื้นของห้อง ซึ่งในโปรแกรม Revit นั้นเราต้องเลือกเครื่องมือ Floor ที่อยู่ในแถบเครื่องมือ Architecture ที่อยู่ด้านบนของจอภาพ โดยวิธีที่เราแนะนำและง่ายที่สุดคือการวาดเส้นกำหนดกรอบของพื้น จากนั้นเราก็กำหนดระดับของพื้นได้จากแถบ properties เช่นเดียวกันกับการกำหนดความสูงของกำแพง
โดยสรุปแล้ว Point Cloud ที่ได้จากการสแกนของเครื่องสแกน Slam 100 นั้นถือว่าสามารถช่วยงานในด้านการสร้างไฟล์ BIM ได้เป็นการอนย่างดี เพราะสามารถมองเห็นภาพรวมของหน้างานได้อย่างสมบูรณ์ สามารถกำหนดค่าต่างๆ ของโครงสร้างได้เช่น ค่าความสูง ขอบเขตในการทำงาน ขนาดพื้นที่ ข้อจำกัดของการเพิ่มองค์ประกอบ สามารถวัดขนาดต่างๆ ได้อย่างแม่นยำ ทำให้เราสามารถเพิ่มความถูกต้องให้กับผู้ที่ทำงานต่อจากเราได้เป็นอย่างดี สำหรับการสแกนพื้นที่ระบบ Lidar นั้นถือว่าเป็นเทคโนโลยีรูปแบบใหม่ในไทย และกำลังได้รับความนิยมเพิ่มมากขึ้นเรื่อยๆ ซึ่งจะแตกต่างจากการทำงานวิศวกรรมในรูปแบบเดิมนั้น ยังคงต้องแลกกับเวลาที่มากขึ้นตามหน้างาน ที่ต้องมีทั้งคนถ่ายภาพ คนวัดระยะ คนจดรายละเอียด และผู้ปฏิบัติหน้าที่อื่นๆ แต่ถ้าหากลองเปลี่ยนมาเป็นการสแกนพื้นที่ระบบ Lidar Scan ที่สามารถเก็บรายละเอียดการทำงานได้ทั้งหมดภายในเครื่องเดียวนั้น ก็จะสามารถประหยัดงบประมาณได้หลายด้านได้ทันที